|
Este es el gran escaparate donde puedes ver lo que hacen los demás, por un lado iremos incluyendo nuestros propios proyectos, y si lo deseas,
también pondremos el tuyo. Como siempre mantenemos nuestra puerta abierta a vuestras sugerencias e ideas para su publicación en esta sección.
(consulta en la sección de ayuda para ver como hacerlo).
Robótica y Meccano.
En la dirección http://www.meccano.es/ podemos encontrar un ejemplo de lo que se puede hacer con mucha imaginación
e ingenio. Se trata nada menos de montajes realizados con las clásicas piezas de Meccano pero actualizadas con la ultima tecnología electrónica mediante
el empleo del Bus I2C. En este sitio web encontraremos además unas librerías para utilizar los diferentes sensores y módulos I2C como el controlador de
motores MD23, el controlador de servos SD21 , el controlador de reles RLY08 o la brújula digital CMPS 03, etc.. con el Microsoft Visual Studio 2005. Gracias
a estas librerías se pueden controlar fácilmente todos estos módulos desde cualquier aplicación realizada con Visual Studio
2005. Recomiendo la visita a la página en la que hay abundante información y fotografías.
SR1 Robot Multi Funcional de Desarrollo y Aprendizaje.

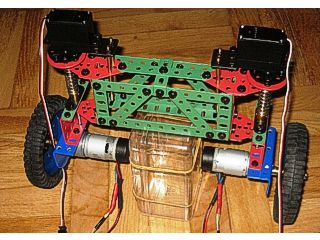
Por fin ya tenemos listo el primer robot de producción 100% propia y que esta pensado para ser una verdadera plataforma de aprendizaje de robótica,
a la vez que posee características y funcionalidades propias de robots muy avanzados. El resultado es un robot compacto y resistente dotado de un
gran número de sensores y elementos opcionales que incluyen desde cámara inalámbrica, hasta radiomodem para control remoto y todo
ello en un robot que puede montar cualquiera gracias al completo manual de instrucciones y a los numerosos programas de ejemplo que incluye. El robot SR1
está disponible para la venta y tiene su propio apartado de mas información en esta sección.
Programa Gratuito de Control de Servos VisualSC2
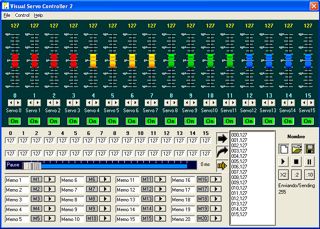
VisualSC2 es la nueva versión del programa gratuito que permite controlar hasta 16 servos de una forma muy sencilla
gracias a su interfaz gráfica. El programa se a actualizado totalmente con nuevos controles y más memorias para adaptarse a las necesidades
de los usuarios. El programa funciona con los circuitos de control de servos como el mini SSC y el controlador de servos de 32 canales SCC-32. Incluye
archivo de ayuda en ingles y español con ejemplos y esquema de conexiones.
Programa Gratuito de Control de Servos VisualSC

VisualSC es un programa gratuito que permite controlar hasta 128 servos de una forma muy sencilla gracias a su interfaz gráfica. Este programa
es parte del proyecto del circuito de control de servos SuperSSC que pronto publicaremos. El programa funciona con los circuitos de control de servos como
el mini SSC. Nueva versión 1.1 Ahora con más memorias y movimientos proporcionales.
Brazo robot de 6 ejes de gran tamaño
 
El brazo robot de seis ejes es un proyecto de construcción de un brazo robot con una dimensiones superiores y que permita realizar movimientos
mas precisos y fluidos. El robot se basa en la utilización de servo motores de gran tamaño y conectados a un circuito de control de servos.
Finalmente se ha optado por una base de tipo ventosa que fija el robot a la mesa. También puede verse como la batería de alimentación
de los servos es aprovechada como contrapeso del hombro.
Circuito de Control de Servos Programable

Este circuito de control de servos es capaz de controlar 8 servos de la misma forma que lo hace el mini SCC II, pero además tiene características
avanzadas como son posibilidad de alimentación única, memoria eeprom capaz de almacenar programas de ejecución autónoma que
permiten realizar movimientos complejos con gran precisión y sin necesidad de intervención por parte de un microcontrolador. También
resulta ideal para emplearse en maquetas y prototipos, pues podemos programar una demo que se ejecutará con solo conectar la alimentación.
Robot Gusano
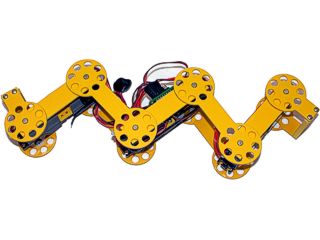 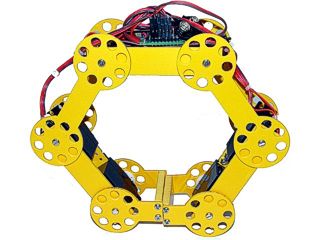
El robot gusano es un prototipo utilizado para el estudio del movimiento de los robots que no tienen patas ni ruedas. La realización de movimientos
en este tipo de robots resulta muy complicada ya que al mover cualquier servo, se altera la posición de todos los demás. Esto quiere decir
que prácticamente hay que mover todos los servos cada vez que se quiere adoptar una nueva postura. El robot esta formado por seis servos conectados
a un circuito de control de servos MiniSSC. El único cable que viene del exterior es la alimentación de los servos y la conexión del
puerto serie. Los movimientos de avance pueden ser bien de reptar como una serpiente mediante movimientos ondulatorios (primera foto) o bien se puede desplazar
como una 'rueda' creando movimientos que hacen que todo el robot avance con solo cambiar los grados de inclinación de los servos para que este se
desplace por gravedad.
|