|
|
|
|
|
|
|
De forma similar a los seres vivos, los sensores facilitan la información necesaria para que los robots interpreten el mundo real. Todo robot debe tener al menos un sensor con el que interactuar. La mayoría de los sistemas robóticos incluyen al menos sensores de obstáculos (bumpers) y algún sensor de guiado por infrarrojos o ultrasonidos. Los sensores avanzados, además de detectar algo, son capaces de reportar una medida de lo detectado, como puede ser un sensor de temperatura, o un medidor de distancias ultrasónico por ejemplo.
|
 |
| Sensores |
|
| S300472 SENSOR DE DISTANCIAS POR ULTRASONIDOS ROBONOVA |

Sensor Ultrasónico con Carcasa de Fijación |
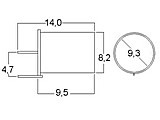
Sensor de distancias por ultrasonidos para Robonova 1 que incluye un sensor Maxsonar EZ1 con cable de conexión tipo servo y una carcasa frontal especialmente mecanizada para alojar el sensor en su interior. El sensor utilizado esta basado en el sensor de ultrasonidos Maxsonar EZ1 que destaca por su pequeño tamaño y bajo consumo. El sensor MaxSonar- EZ1 detecta objetos situados entre 0 y 6,45 metros de distancia, proporcionando los datos obtenidos del cálculo de la distancia con una resolución de 1 pulgada (2,54 cm). El sensor se atornilla en el interior de la carcasa frontal incluida de forma que se sitúa en la parte central del pecho del Robonova. El sensor incluye un cable de conexión tipo servo para conectarlo directamente en el circuito de control del Robonova. Se incluyen el sensor, la carcasa y los tornillos. Manual de instrucciones Aquí. |
37,55-€
IVA incluido
|
| S320085 SENSOR TERMICO DE 8 PIXELES CON BARRIDO TPA81 |

Piro Sensor de Matriz Lineal. |
TPA81 es un sensor térmico de 8 pixeles capaz de medir la temperatura de un objeto a distancia. Este sensor esta formado en realidad por una matriz de 8 sensores colocados linealmente de forma que puede medir 8 puntos adyacentes simultáneamente. A diferencia de los sensores pir utilizados en sistemas de alarmas y detectores para encender luces, el sensor térmico no necesita que haya movimiento para detectar el calor, por lo que su aplicación en el campo de la robótica, abre gran cantidad de aplicaciones no disponibles hasta ahora. El sensor se conecta por bus I2C y además se le puede conectar un servo estándar que es controlado por el propio sensor para hacer un barrido y tomar 32 mediciones diferentes, obteniendose un mapa térmico de 180 grados. El TPA81 es capaz de detectar la llama de una vela a 2 metros de distancia y además no le afecta la luz ambiental. Mas Información |
81,25-€
IVA incluido
|
| S320103 SENSOR INFRARROJOS SHARP GP2D12 |

Medidor Analógico de Distancias por Infrarrojos. |
El Sharp GP2D12 es un sensor medidor de distancias por infrarrojos que indica mediante una salida analógica la distancia medida. La tensión de salida varia de forma no lineal cuando se detecta un objeto en una distancia entre 10 y 80 cm. La salida esta disponible de forma continua y su valor es actualizado cada 32 ms. Normalmente se conecta esta salida a la entrada de un convertidor analógico digital el cual convierte la distancia en un numero que puede ser usado por el microprocesador. La salida también puede ser usada directamente en un circuito analógico. Hay que tener en cuenta que la salida no es lineal. El sensor utiliza solo una línea de salida para comunicarse con el procesador principal. El sensor se entrega con un conector de 3 pines. Tensión de funcionamiento 5V, Temperatura funcionamiento:-10 a 60ºC, Consumo Medio: 35 mA. Margen de medida 10cm a 80 cm. Hoja de características técnicas en formato pdf. Mas Información |
27,65-€
IVA incluido
|
| S320105 SENSOR INFRARROJOS SHARP GP2D15 |

Medidor de Distancias Preajustado a 24 cm. |
El Sharp GP2D15 es un sensor medidor de distancias por infrarrojos que indica mediante una salida digital si hay un objeto a menos de 24 cm. De forma continua, esto significa que no es necesario ningún tipo de circuito de control ni temporización externo. Basta con aplicar tensión para que la medida esté disponible cada 50 ms. El sensor utiliza solo una línea de salida para comunicarse con el procesador principal. El sensor se entrega con un conector de 3 pines. Tensión de funcionamiento 5V, Temperatura funcionamiento:-10 a 60ºC, Consumo Medio: 35 mA. Margen de medida 24cm +- 3 cm. Mas Información |
27,65-€
IVA incluido
|
| S320106 SENSOR INFRARROJOS SHARP GP2Y0D02YK |

Medidor Analógico de Distancias por Infrarrojos. |
El sensor Sharp GP2Y0D02YK es un sensor de distancia por infrarrojos cuyas características eléctricas son idénticas a la del sensor GP2D15, pero emplea unas lentes especiales que le proporcionan un rango de trabajo mucho mayor. La distancia de detección viene fijada de fábrica a 80 cm +- 10 cm. La salida esta disponible de forma continua, esto significa que no es necesario ningún tipo de circuito de control ni temporización externo. Basta con aplicar tensión para que la medida esté disponible cada 50 ms. El sensor utiliza solo una línea de salida para comunicarse con el procesador principal. El sensor se entrega con un conector de 3 pines. Tensión de funcionamiento 5V, Temperatura funcionamiento:-10 a 60ºC, Consumo Medio: 35 mA. Margen de medida 80cm +- 10 cm.Puede descargar el PDF del fabricante aquí;. Mas Información |
30,85-€
IVA incluido
|
| S320109 SRF235 SENSOR ULTRASONIDOS ALTA FRECUENCIA |

Medidor Ultrasónico de Distancias SRF235 |
SRF235 es un medidor de distancias por ultrasonidos de alta frecuencia y haz estrecho con conexión I2C de múltiples aplicaciones dentro de la robótica. Este sensor de ultrasonidos destaca por utilizar un sensor ultrasónico industrial que funciona a una frecuencia de 235Khz y con un haz de solo 15 grados lo que proporciona una medida de altísima precisión y gran direccionabilidad. Debido a su alta frecuencia, puede efectuar hasta 100 mediciones por segundo, siendo toda la temporización totalmente interna liberando al microcontrolador de retardos y tiempos de espera. Gracias a su bus I2C se pueden conectar hasta 16 unidades con solo dos líneas de entrada y salida, permitiendo montar un completo sonar perimetral en cualquier robot con solo dos pines libres. Este sensor se puede utilizar a la vez que otros sensores de 40 Khz como el srf8 ya que no se hacen interferencias entre si. Mas Información |
133,15-€
IVA incluido
|
| S320110 SRF04 SENSOR DISTANCIAS POR ULTRASONIDOS SRF04 |

Medidor Ultrasónico de Distancias SRF04 |
SRF04 es un sensor de distancias por ultrasonidos capaz de detectar objetos y calcular la distancia a la que se encuentra en un rango de 3 a 300 cm. El sensor srf04 funciona por ultrasonidos y contiene toda la electrónica encargada de hacer la medición. Su uso es tan sencillo como enviar el pulso de arranque y medir la anchura del pulso de retorno. De muy pequeño tamaño, destaca por su bajo consumo, gran precisión y bajo precio por lo que esta reemplazando a los sensores Polaroid en los robots mas recientes. Alimentación 5V. Consumo medio 30mA. Medidas 43 x 20 x 17 mm. Totalmente montado es compatible con cualquier microcontrolador como Basic Stamp, OOPIC, BasicX-24, Pic, BX-24, etc. Mas Información |
26,35-€
IVA incluido
|
| S320111 SRF05 SENSOR DISTANCIAS ULTRASONIDOS SIMPLE |

Sensor de Distancias de Interfaz Simple |
SRF05 es un nuevo sensor de distancias pensado para ser una actualización del clásico SRF04 con el que es compatible, pero además añadiendo nuevas funciones y características. En el modo estándar, el SRF05 se comporta igual que el SRF04 con la diferencia de que el rango de trabajo se ha aumentado de 3 a 4 metros. Esto significa que todo el software que funciona con el SRF04, funciona con el SRF05. Por otro lado, el SRF05 cuenta con un nuevo modo de trabajo que emplea un solo pin para controlar el sensor y hacer la lectura de la medida. Lo que se hace es mandar un impulso para iniciar la lectura y luego poner el pin en modo entrada. Después basta con leer la longitud del pulso devuelto por el sensor, que es proporcional a la distancia medida por el sensor. El SRF05 es mecánicamente igual al SRF04, por lo que puede ser un sustituto de este. Mas Información |
20,75-€
IVA incluido
|
| S320112 SRF08 SENSOR DISTANCIAS POR ULTRASONIDOS I2C SRF08 |

Medidor de Distancias I2C Gran Alcance srf08 para robot |
SRF08 es un medidor de distancias por ultrasonidos para robots con conexión I2C, es el mas sensible y preciso del mercado, con muchas mejoras respecto a los sensores Polaroid. El sensor tiene un alcance de 6m y un consumo de 35 mA activo y de solo 3mA en reposo. Gracias a su bus I2C se pueden conectar hasta 16 unidades con solo dos líneas de entrada y salida, permitiendo montar un completo sonar perimetral en cualquier robot con solo dos pines libres. Como valor añadido, incorpora un sensor fotoeléctrico que indica el nivel de iluminación a través también del bus I2C. Su reducido tamaño, su bajo consumo y su posibilidad de multiconexión convierten al srf08 en el sensor ultrasónico de distancias para robots y proyectos de robótica que no tiene rival. Mas Información |
44,75-€
IVA incluido
|
| S320114 SRF10 MINI SENSOR DISTANCIAS ULTRASONIDOS I2C |

Medidor de Distancias I2C Gran Alcance srf10 para robot |
SRF10 es un medidor de distancias por ultrasonidos miniatura para robots con conexión I2C, es el mas sensible y preciso del mercado, con muchas mejoras respecto a los sensores Polaroid. El sensor tiene un alcance de 6m y un consumo de 15 mA activo y de solo 3mA en reposo. Gracias a su bus I2C se pueden conectar hasta 16 unidades con solo dos líneas de entrada y salida, permitiendo montar un completo sonar perimetral en cualquier robot con solo dos pines libres. Su reducidas dimensiones de 32 x 15 x 10 mm lo convierten en el sensor ultrasónico mas pequeño del mundo. Mas Información |
44,75-€
IVA incluido
|
| S320117 SRF06 MINI SENSOR DISTANCIAS ULTRASONIDOS 4-20 mA |

Sensor Distancias con Salida 4-20 mA |
SRF06 es un sensor de ultrasonidos cuya característica principal es que se conecta y alimenta directamente mediante bucle de corriente de 4-20 mA. Este tipo de bucle es muy utilizado en entornos de instrumentación industrial y entre otras ventajas permite alimentar el modulo con el mismo cable por el que se realiza la medición. El rango de trabajo es de 2cm a 5,1 metros. La salida de corriente es de 4mA con rango de 0 y de 20mA con una medida de 5,1 metros, lo que implica un valor nominal de 4mA + 31,37 uA por cada centímetro de medición. La tensión del bucle debe estar entre los 9v y los 24V para el funcionamiento correcto del modulo. El sensor ultrasónico SRF06 realiza medidas continuas cada 70 -100 mS. Las conexiones del sensor se limitan a la entrada del positivo y el negativos del bucle de corriente, estando además protegidas por un diodo contra inversiones de polaridad. Este sensor esta especialmente indicado para cuando se utilizan dispositivos con capacidad de medida de bucles de 4 -20mA. Si no dispone de este tipo de bucle es mejor utilizar otro tipo de sensor con diferente conexión. |
25,65-€
IVA incluido
|
| S320118 SRF485WPR SENSOR ULTRASONIDOS INTEMPERIE |

Sensor Distancias Resistente al Agua. |
SRF485WPR es un sensor de distancias por ultrasonidos resistente al agua y con conexión mediante bus RS485, lo que permite conectar hasta 127 dispositivos en el mismo bus. El rango de medición es de 60 cm a 500 cm. La alimentación nominal es de 12V, pero trabaja en los márgenes de 8 a 14 voltios sin problemas. La temperatura esta compensada entre los -30ºC y los +50 ºC y el sensor tiene un diámetro de 25 mm. Todas las conexiones se realizan mediante un conector IDC de 10 pines lo que facilita enormemente la conexión en cadena de múltiples módulos mediante cable plano. Este sensor tiene muchas aplicaciones industriales dada sus especiales características, siendo una de ellas la detección de vehículos en las plazas de aparcamiento. El módulo solo puede emplarse en el aire y no puede sumergirse bajo ningún concepto. |
42,55-€
IVA incluido
|
| S320124 SRF01 SENSOR DE DISTACIAS POR ULTRASONIDOS SERIE |

Sensor Distancias Simple Conexión Serie |
SRF01 es un sensor de distancias por ultrasonidos con conexión serie que destaca por su pequeñísimo tamaño. El sensor utiliza solo un pin para la conexión seria a nivel TTL por lo que se puede conectar directamente a la mayoría de los microcontroladores. El sensor funciona a 9600 baudios pero hay un comando que permite cambiar la velocidad a 19200 o 38400, también cuenta con un identificador, por lo que se puede tener hasta 16 sensores SRF01 con la misma línea serie. La alimentación de 3,3V a 5,5V, Consumo 25mA activo y 11mA en reposo. Atención la conexión serie no es RS232 por lo que NO PUEDE CONECTARSE DIRECTAMENTE A UN PUERTO RS232. El rango de trabajo normal es de 18 a 600 cm, pero puede calibrarse para que funcione de 0 a 600cm. Cada sensor incluye una arandela de goma que facilita el montaje en panel con un diámetro de 20 mm y un espesor de 1,7 mm. |
27,95-€
IVA incluido
|
| S320126 MINI SENSOR DE DISTANCIAS DIGITAL |

Detección de Objetos Digital |
Este sensor de distancias digital detecta objetos a una distancia de entre 2 cm y 10 cm. Con su rápido tiempo de respuesta, pequeño tamaño y bajo consumo de corriente, es una buena opción para la detección de objetos sin contacto, y fácil de integrar en su proyecto. Este sensor es una excelente manera de detectar la presencia de objetos cercanos. Mas Información |
36,25-€
IVA incluido
|
| S320137 MINI SENSOR PROXIMIDAD POR INFRARROJOS |

Detector de Objetos por IR |
Sensor de proximidad por infrarrojos con un sensor IR modulado de 38 kHz de ganancia fija y un LED IR con un circuito oscilador. Esta versión de alto brillo dibuja un promedio de 16 mA y tiene un rango de detección aproximada de 60 centímetros. Este sensor de proximidad cuenta con un LED IR controlado por un circuito basado en temporizador 555 para hacer un módulo completo que requiere solo una conexión de alimentación de 3.3 V a 5 V. Mas Información |
56,65-€
IVA incluido
|
| S320140 SENSOR PIR PARA ROBOT |

Detector de Movimientos por Infrarrojos |
El sensor pir detector de movimientos por infrarrojos resulta muy adecuado para su empleo en robots, gracias a su pequeño tamaño y bajo consumo. El sensor incluye una lente tipo fresnel de plástico que le proporciona un alcance de 5 metros y un ángulo de detección de 60 º. La señal de salida es compatible TTL y la alimentación es de 5V con un consumo de tan solo 350 uA mientras esta en reposo. Sus reducidas dimensiones de solo 25 x 35 x 18 mm hacen posible su utilización en todo tipo de robots y dispositivos sensores. Mas Información |
22,15-€
IVA incluido
|
| S320142 SENSOR DE CORRIENTE ENTRE -30A Y +30A |

Medidor de Corriente 5V 30A |
Sensor de corriente para circuitos de ± 30A con baja resistencia (~ 1,2 mW) y aislamiento eléctrico de hasta 2,1 kV RMS. Este sensor acepta una entrada de corriente bidireccional con una magnitud de hasta 30 A y emite una tensión analógica proporcional (66 mV/A) centrado a 2,5 V con un error típico de ± 1,5%. Funciona en un rango de 4,5 a 5,5 V y su uso está destinado para sistemas de 5 V.
Sensor de corriente para tensiones de hasta 30V de alta precisión y fiabilidad con un error típico de ± 1,5% a temperatura ambiente con la calibración de fábrica. El rango de temperatura de trabajo de grado automotriz es de -40ºC a 150ºC. El sensor necesita 5V para su alimentación y proporciona una salida de 66 mV por amperio medido por encima o por debajo de 2,5V en función de la polaridad. |
12,45-€
IVA incluido
|
| S320146 SENSOR DE GAS Y HUMO MQ2 |

Detector de Humos y Gas |
Este pequeño sensor de gas detecta la presencia de gas combustible y humo en concentraciones de 300 a 10.000 ppm. Incorpora una sencilla interfaz de tensión analógica que únicamente requiere un pin de entrada analógica del microcontrolador.
Con la conexión de cinco voltios en los pines el sensor se mantiene lo suficientemente caliente para que funcione correctamente. Solo tiene que conectar 5V a cualquiera de los pines (A o B) para que el sensor emita tensión. La sensibilidad del detector se ajusta con una carga resistiva entre los pines de salida y tierra. Hay disponible un circuito impreso con referencia S320260 que facilita su conexión como sensor independiente. |
7,65-€
IVA incluido
|
| S320148 SENSOR DE MONOXIDO DE CARBONO Y GAS MQ9 |

Detector Gas combustible y CO |
Sensor que detecta la presencia de monóxido de carbono en concentraciones de 10 a 1000 ppm y de gas combustible en concentraciones que oscilan entre 100 y 10.000 ppm. Incorpora una interfaz sencilla para controlar la tensión analógica del sensor, que únicamente requiere un pin de entrada analógica en el microcontrolador.
El sensor puede medir las concentraciones de monóxido de carbono y de gas inflamable. Funciona en temperaturas comprendidas entre -10 a 50 ° C y consume menos de 150 mA. a 5 V. Una conexión de 5V en cualquiera de los pines de entrada es suficiente para que este sensor funcione correctamente y una carga resistiva entre los pines de salida y tierra ajusta la sensibilidad del detector. Hay disponible un circuito impreso con referencia S320260 que facilita su conexión como sensor independiente. |
11,45-€
IVA incluido
|
| S320150 SENSOR DE VIBRACION SIN MERCURIO |
Sensor Detector Vibración |
Sensor de vibración sin mercurio específicamente diseñado para la detección del movimiento y la vibración. No le afecta la posición de montaje, ofreciendo un nivel similar de sensibilidad independientemente de ésta, siendo adecuado para circuitos analógicos o digitales. El sensor reacciona cuando
es desequilibrado por un impacto o vibración, produciendo un breve cambio de estado (pasa de abierto a cerrado o viceversa). El tiempo de perturbación dependerá de la cantidad de energía recibida en el momento del impacto. El estado en el que se estabilizará será arbitrario, a menos que la posición de montaje sea elegida para una salida NC. Características: Tensión Max: 24 Vac, Corriente Max: 25 mA, Resistencia Max: 5 ohmio, Temperatura trabajo:-37 a 100ºC. Angulo: Indiferente. Dimensiones aprox: 10 x 8 mm. No cortar los terminales. Hoja de características aquí. |
13,45-€
IVA incluido
|
| S320155 SENSOR DE ACELERACION LINEAL |
Detector de Aceleración e Impactos |
Sensor de aceleración formado por una cápsula hermética que contiene un contacto normalmente abierto y que se cierra cuando se produce una aceleración o impacto superior a 5 G +-1,5 G. Cuando en nivel de aceleración decrece por debajo del umbral de disparo, el contacto se habré de nuevo. Este sensor resulta útil para detectar impactos y agresiones en los robots. Dado la brevedad del contacto en caso de impacto, es recomendable utilizarlo junto con alguna entrada de interrupción, o con algún circuito de tipo biestable con memoria que permita reconocer el evento ocurrido. Características Tensión Max: 24Vac, Corriente Max: 250 mA, Resistencia Max: 10 ohmio, Temperatura Trabajo: -20 a 85ºC. Dimensiones 7 x 5 mm. No cortar los terminales. |
21,05-€
IVA incluido
|
| S320158 SENSOR DE TEMPERATURA ANALOGICO -40º A 125º TSA01 |

Sensor de Temperatura con Salida Analógica |
TSA01 es un sensor de temperatura basado en el Microchip MCP9700A que ofrece una salida de 10 mV. por grado centígrado con un rango de -40 a +125 grados. La precisión típica es de +-1 grado entre 0 y 70º. Necesita una alimentación de 2.3V a 5V con un consumo de 6uA. La salida a 0º es de 500mV. Este sensor debe ser conectado al circuito controlador empleando cable trenzado y apantallado, conectando la malla a los 0V. Los cables trenzados deben conectarse a la entrada de 5V y el otro a la salida T del circuito. |
9,85-€
IVA incluido
|
| S320160 SENSOR BRUJULA DIGITAL CMPS03 |

Sensor de Campos Magnéticos para Robot |
Esta brujula digital CMPS03 es un sensor de campos magnéticos que una vez calibrado ofrece una precisión de 3-4 grados y una resolución de décimas. Tiene dos interfaces, mediante pulsos temporizados, o bien por medio de un bus I2C, lo que facilita su comunicación con una amplia gama de microcontroladores, incluyendo los Basic Stamp, OOPIC y otros lenguajes compilados. A destacar: alimentación 5v, 20 ma, dimensiones 32 x 35 mm. Económico. Aplicaciones: Plataformas robóticas móviles, robots autónomos, robots exploradores, sistema de guiado a rumbo para robótica, navegadores, etc Mas Información |
35,05-€
IVA incluido
|
| S320163 CMPS10 SENSOR BRUJULA DIGITAL COMPENSADO EN INCLINACION |

Sensor Brújula Digital con Acelerómetro |
CMPS10 es un sensor de brújula digital compensado en inclinación. Este sensor emplea un magnetrómetro de 3 ejes, un acelerómetro de 3 ejes y un microcontrolador de 16 bits para compensar el error causado cuando se inclina el circuito. La salida del circuito es un numero de 0 a 3599 que representa de 0 a 359,9 grados o bien un valor entre 0 y 255. La salida de los tres sensores magnéticos se compensan con los valores de inclinación de los acelerómetros para calcular el rumbo. Los valores de todos los componentes utilizados en la medición también están disponibles en formato RAW. La alimentación es de 3,3 a 5V con un consumo de 25 mA. El modulo CMPS10 cuenta con interfaz serie (a nivel TTL), interfaz I2C y modo de salida de PWM. Sus diminutas dimensiones lo hacen ideal para un amplio abanico de posibilidades y todo tipo de robots. Resolución 0,1 Grados. Precision Horizontal Tipica: 0,5%. Precision Inclinado +-60º: 1%. Dimensiones 24x18 mm. Totalmente compatible a nivel de software y de hardaware con el modelo CMPS09. |
34,55-€
IVA incluido
|
| S320165 SENSOR DE INCLINACION |
Detector de Inclinación sin Mercurio |
Sensor de inclinación completamente exento de mercurio y totalmente autocontenido en una cápsula metálica. El sensor es para montaje horizontal, su estado de conmutación cambia al ser inclinado unos 10º de la horizontal. Los contactos del sensor estarán normalmente abiertos o cerrados, según en la posición en que se monte. La sensibilidad cambia según la posición de montaje. Muy útil para detectar si un robot esta volcado, esta siendo atacado o simplemente cuando el robot colisiona con algo y trata de montarse en el. Tensión
Max: 60 Vdc, Corriente Max: 250 mA, Resistencia Max : 30 ohmio, Temperatura trabajo:-37 a 100ºC. Dimensiones Aprox: 10 x 5 mm. No cortar los terminales. Hoja de caracteristicas aquí. |
10,15-€
IVA incluido
|
| S320168 SENSOR DE INCLINACION CAPSULA RECTA |

Sensor de Inclinación Conexión Recta |
Sensor de inclinación con conexión recta sin mercurio. Este sensor de inclinación mantiene un contacto cerrado siempre que se mantenga horizontal con un margen de trabajo de unos 15 . Tan pronto como el sensor de incline mas de 15 grados el contacto se interrumpe. Consultar la hoja de características técnicas para mas detalles. |
1,25-€
IVA incluido
|
| S320169 SENSOR DE INCLINACION CAPSULA 90 GRADOS |

Sensor de Inclinación Conexión 90 Grados |
Sensor de inclinación con conexión a 90 grados recta sin mercurio. Este sensor de inclinación mantiene un contacto cerrado siempre que se mantenga horizontal con un margen de trabajo de unos 15 . Las patillas de conexión ya vienen en 90 grados por lo que se puede colocar sobre cualquier circuito que este horizontal. Tan pronto como el sensor de incline mas de 15 grados el contacto se interrumpe. Consultar la hoja de características técnicas para mas detalles. |
1,85-€
IVA incluido
|
| S320170 IC SENSOR DE INFRARROJOS TSOP4838 |

Sensor de Infrarrojos Modulado a 38 KHz |
TSOP4838 es un sensor de infrarrojos empleado para recibir las señales infrarrojas de
los mandos a distancia empleados normalmente en los electrodomésticos. El sensor tiene un su interior un circuito amplificador y un oscilador a 38 Khz que permiten la recepción de las señales incluso en presencia de fuentes de luz intensas.
Este sensor se conecta a un microcontrolador permitiendo recibir las señales de control de la mayoría de los mandos a distancias y hacer mediante software que el circuito ejecute diferentes instrucciones en función de las ordenes recibidas. Este sensor reemplaza al TSOP 1838. Hoja de características del fabricante Aquí. |
1,35-€
IVA incluido
|
| S320195 GIROSCOPO PIEZOELECTRICO PK3 |

Sensor Giroscópico para Servos de un Canal |
Giróscopo piezoeléctrico de un canal utilizado habitualmente en aviones y helicópteros de radiocontrol para compensar de forma automática los giros bruscos. El giróscopo es completamente electrónico, sin partes móviles, lo que hace que sea muy pequeño, tenga un bajo consumo y una respuesta muy rápida. La entrada del giróscopo se conecta en lugar del servo que se quiere compensar y el servo se conecta a su vez al giróscopo. Todas las ordenes de control pasan directamente al servo de forma transparente. Tan pronto como se produce un movimiento angular (por ejemplo inclinación) el giróscopo manda al servo un señal proporcional para compensar el movimiento. Por ejemplo, aplicado al rotor de cola de un helicóptero, cuando el helicóptero acelera, la cola tiende a girar lateralmente como consecuencia del par rotor. Si se utiliza el giróscopo en este caso, lo que hace es mandar una señal de control al servo que controla la cola, para aumentar el paso y compensar la desviación. En el caso de los robot, la salida en lugar de conectarse a un servo, se conecta a un microcontrolador que puede leer la anchura del pulso del giróscopo y así saber cuando se produce un giro. Los giróscopos son esenciales en los robots de tipo balancín y el los sistemas de guiado de precisión en el que hay que medir y compensar el momento de giro. Características técnicas: Dimensiones 26 x 27.5 x 11.3 mm. Peso: 7 g. Tensión de funcionamiento: 4.8 - 6V. Consumo de corriente: 10 mA. Ajuste de sensibilidad y de valor neutro mediante dos potenciómetros. |
75,45-€
IVA incluido
|
| S320205 SENSOR DE SONIDO HITEC |

Sensor Microfónico para Robots |
Este pequeño sensor de sonidos produce una salida de tensión en función del nivel sonoro que haya a su alrededor, por lo que se puede conseguir, por ejemplo, que su robot reaccione al dar usted una palmada. Este sensor presenta un tamaño super compacto y actúa como un micrófono conectado a su robot. |
2,35-€
IVA incluido
|
| S320215 SENSOR DE DISTANCIA INFRARROJOS HITEC |

Sensor Infrarrojo para Robot |
Sensor de distancia por infrarrojo para robot con un alcance máximo de 15 cm. Este sensor es muy simple y funciona por reflexión detectando la presencia o no de objetos, pero sin proporcionar un valor numérico de la misma. El sensor se conecta como si fuera un servo mas, alimentándose directamente de la placa microcontroladora del robonova. Este sensor es muy útil para detectar obstáculos y objetos cercanos o para evitar colisiones. Dimensiones: 13 x 25 Mm. Peso:7g. Alimentación: 5V. Longitud del cable 318 mm. |
13,05-€
IVA incluido
|
| S320220 SENSOR DE LUZ HITEC |

Sensor Detector de Luz para Robot. |
Sensor de luz para robot. El sensor reacciona cuando hay luz, lo que permite detectar entre zonas iluminadas y oscuras. Muy útil para hacer seguimiento de luz o hacer que el robot reaccione ante cambios repentinos de iluminación, como por ejemplo al encender una luz en una habitación. Es muy pequeño y fácil de utilizar, ya que solo hay que conectarlo en un puerto de la placa controladora como si fuera un servo mas, desde donde también recibe la alimentación. Dimensiones: 13 x 15 mm. Peso:6g. Alimentación: 5V. Longitud del cable 322 Mm. |
13,05-€
IVA incluido
|
| S320260 CIRCUITO IMPRESO PARA SENSOR MQ |

Placa para Montaje de Sensor de Gas |
Circuito impreso diseñado para funcionar con cualquiera de los sensores de gas que tenemos disponibles. La gran ventaja de este circuito es la interfaz tan sencilla que presenta, ya que solo presenta 3 pines: tierra, alimentación y tensión de salida. La placa presenta dos orificios para facilita el montaje y sitio para colocar las resistencia de ajuste de la sensibilidad. |
1,55-€
IVA incluido
|
| S320405 POTENCIOMENTRO LINEAL 47K EJE 6MM |

Potenciómetro Carbon 47K |
Potenciómetro lineal de 47K con eje estándar de 6 MM. Este potenciómetro se utiliza junto con los circuitos de control de motores de corriente continua para controlar la velocidad. Por ejemplo puede utilizarse con el circuito S 310103 para controlar 2 motores de hasta 5 amperios o bien con el S310110 para controlar un motor de hasta 20 Amperios. |
3,95-€
IVA incluido
|
| S320410 MANDO GOMA NEGRA PARA POTENCIOMETRO EJE 6MM |

Mando Para Potenciometro 6 MM |
Mando de Goma para potenciómetro. Este pequeño mando puede emplearse con cualquier potenciómetro con eje de 6 mm. Encastre a presión. |
1,95-€
IVA incluido
|
| S330230 CABLE PARA BUS I2C MOLEX DE 4 CONEXIONES 30 CM |

Conexión Molex 4 Hilos |
Cable para hacer conexiones con los circuitos y sensores que utilizan el bus I2C. Este cable resulta muy útil cuando se quieren conectar varios circuitos I2C entre si, como por ejemplo cuando se quieren hacer conexiones entre el circuito USBI2C y varios sensores de ultrasonidos. En estos casos el cable de 4 conexiones se utiliza en el lado del USBI2C y el de 5 conexiones por cada uno de los sensores I2C. El cable tiene un conector Molex de 4 pines separados 2,54 mm en un extremo y cables sueltos en la otra. Longitud 30 cm. |
3,85-€
IVA incluido
|
| S330232 CABLE PARA BUS I2C MOLEX DE 5 CONEXIONES 30 CM |

Conexión Molex 5 Hilos |
Cable para hacer conexiones con los circuitos y sensores que utilizan el bus I2C. Este cable resulta muy útil cuando se quieren conectar varios circuitos I2C entre si, como por ejemplo cuando se quieren hacer conexiones entre el circuito USBI2C y varios sensores de ultrasonidos. En estos casos el cable de 4 conexiones se utiliza en el lado del USBI2C y el de 5 conexiones por cada uno de los sensores I2C. El cable tiene un conector Molex de 5 pines separados 2,54 mm en un extremo y cables sueltos en la otra. Longitud 30 cm. |
4,65-€
IVA incluido
|
| S360142 SOPORTE PARA MINI SENSOR DE DISTANCIAS |

Soporte Metálico de Servo para Sensor de Distancias SRF10 |
Soporte de aluminio especialmente desarrollado para utilizarse con el mini sensor de distancias por ultrasonidos srf10. El sensor permite montar el sensor sobre el plato de un servo con la idea de que se pueda mover hacia un lado u otro a modo de radar. El soporte incluye dos arandelas de goma que permiten sostener el sensor por presión sobre los traductores ultrasónicos sin necesidad de emplear tornillos. |
5,55-€
IVA incluido
|
| S360146 SOPORTE MULTIPROPOSITO PARA SENSOR DE DISTANCIAS |

Soporte de Aluminio para Sensor |
Soporte de aluminio negro especialmente diseñado para la sujeción de los sensores de distancia por ultrasonidos como el SRF04, SRF05 y SRF08 en un servo motor. Con este sistema se puede girar y apuntar el sensor en un ángulo de 180 grados a modo de radar. Esta es una buena solución en robots pequeños, ya que evita tener que utilizar varios sensores apuntando a distintas direcciones para cubrir la misma área. También se puede utilizar con los sensores de infrarrojos como los Sharp de la serie GP2. Incluye los tornillos necesarios para el montaje del sensor y del servo. |
9,15-€
IVA incluido
|
|
| Sensores |
|
|
Ir a la Página Principal de www.SuperRobotica.com

Actualizada el 09/01/2026 © 2002 - 2026 INTPLUS ®. Todos los derechos reservados
|