|
Como controlar un motor con un potenciómetro
Por Pablo Pompa
En este tutorial vamos a ver como podemos controlar la velocidad y el sentido de giro de un motor de corriente continua.
Mas concretamente lo que haremos es montar un circuito que sea capaz de hacer todo ello con un simple potenciómetro
de forma que cuando el potenciómetro este en el centro el motor este parado y cuando se gira el potenciómetro a los lados
el motor gira a cada lado de forma regulada. También hay la posibilidad de que no haya cambio de sentido y que solo
se regule la velocidad del motor con todo el recorrido del potenciómetro
Esta es una aplicación con gran demanda ya que se trata de algo aparentemente muy sencillo y que tiene muchas aplicaciones. El
control de motores de forma precisa, requiere de un circuito electrónico especializado que realiza la regulación de
la velocidad mediante una técnica denominada PWM (Pulse Wide Modulation) y que consiste básicamente en variar la cantidad
de tiempo que el motor recibe tensión. Si el motor recibe tensión. de forma constante, este gira a su máxima velocidad
y potencia. Con PWM lo que se hace es aplicar la máxima tensión., pero no todo el tiempo, si no a pulsos, con lo que se consigue
regular la velocidad manteniendo la potencia del motor. Otro sistema de control consiste en regular la tensión. que se aplica al motor de forma que cuanto menos tensión., menos velocidad. La pega de este sistema es que también pierde bastante potencia por lo que no es indicado la mayoría de las veces.
La segunda función que hace el circuito de control de motores, es encargarse del sentido de giro. En una aplicación
sin circuito, hay que cambiar la polaridad del motor para que este cambie el sentido de giro, lo que
implica
usar algún tipo de conmutador doble que haga la inversión de polaridad. Una ventaja adicional de usar un circuito de
control es el hecho de que tenemos arranques y paradas mucho mas suaves, lo cual resulta muy bueno en las mayoría de
los casos.

Todo lo que necesitamos para aparte del circuito de control es un potenciómetro y un regulador con sus correspondientes cables de conexión.
El material necesario para hacer el control de velocidad es el siguiente:
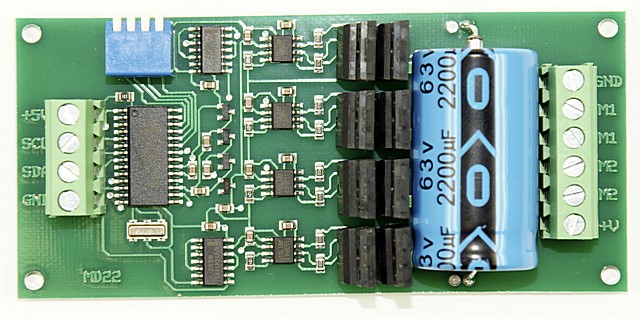
Adicionalmente necesitaremos un motor a controlar y si queremos, un mando para el potenciómetro como el S320410. El
circuito MD22 es capaz de controlar hasta 2 motores de 5 amperios cada uno con una tensión. de 5 a 24 V, según el motor
empleado. Una característica de este circuito es que solo necesita de un potenciómetro para hacer todo el trabajo. Consultar
la página del circuito para mas información sobre los diferentes modos de trabajo. Para la aplicación que queremos
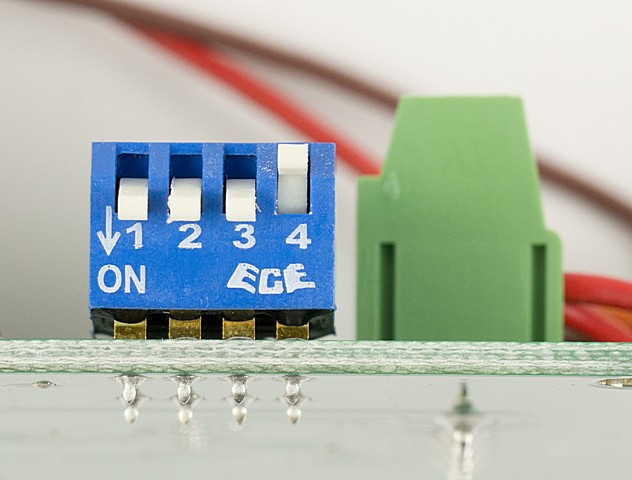
hacer lo que hay que hacer es colocar los micro interruptores dil tal y como aparece en la siguiente imagen para seleccionar
el modo analógico con inversión Si no queremos la inversión y solo deseamos el control de la velocidad, es necesario levantar
el interruptor numero 1.
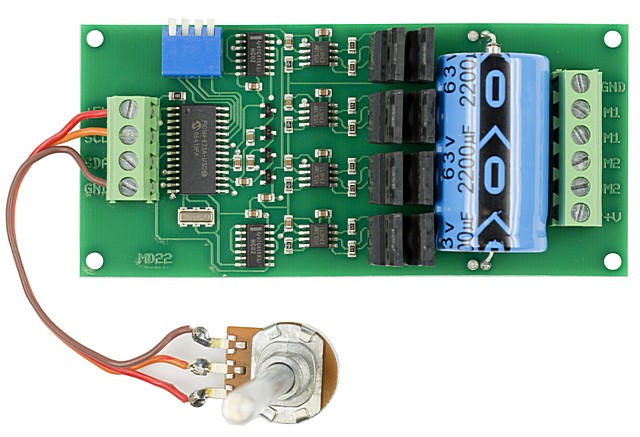
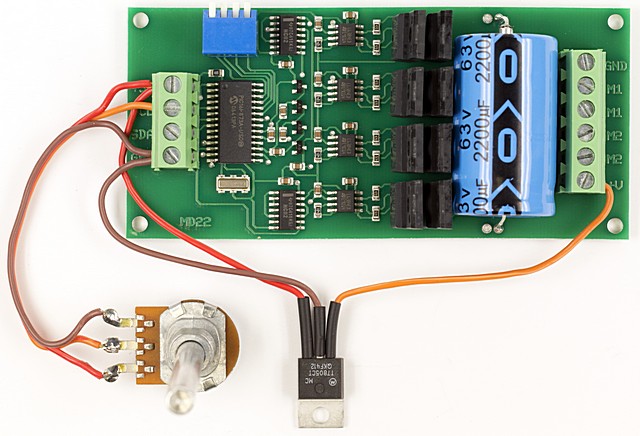
El montaje es muy sencillo, lo único que hay que hacer es soldar unos 3 cables al regulador de tensión. y otros tres
al potenciómetro tal y como aparece en la imagen superior. Primero se conecta el potenciómetro tal y como se muestra
en la siguiente imagen.
Después se conecta el regulador de tensión. con los otros tres cables tal y como se ve a continuación.
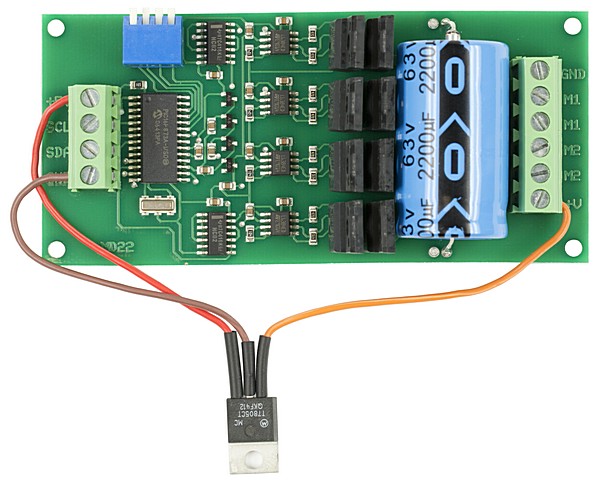
Y el resultado final es:
Ahora ya solo queda conectar el motor es las bornas M1 y M1 y la alimentación de en las bornas GND para el negativo
y +V para el positivo. La alimentación puede proceder de cualquier fuente o batería de 5 a 24 V y con la potencia necesaria
para alimentar el motor.
En caso de que se quiera controlar 2 motores, el segundo motor se conecta en los bornes M2 y M2 y el segundo potenciómetro
se conecta igual que el primero con la excepción de que el cable naranja se conecta a la borna SDA. También se pueden
controlar los dos motores de forma simultanea con un solo potenciómetro, en ese caso lo que se hace es hacer un puente
que una las bornas SCL y SDA.

Por ultimo se recomienda montar todo el conjunto en una caja para protegerlo y evitar cortocircuitos.
Puede ver un ejemplo de aplicación practica de este montaje en el tutorial: Carril motorizado para fotografía y vídeo.
Febrero 2012
|